Funciones:
+16.25.34.png)
Para realizar éste problema utilicé la las funciones que nos proporciona octave las cuales son la de nyquist que nos devuelve su diagrama y margin.
"Control de velocidad de un motor de corriente directa"





"If a professor is currently at the machine, there will be no student at the machine for at least the next three transitions."
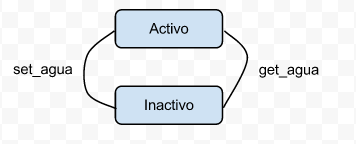
"Si un profesor se encuentra actualmente en la máquina, no habrá ningún estudiante en la máquina durante al menos los próximos tres transiciones."(pam→(¬eam º tt))
"Optimal Estimation of Position and Heading for Mobile RobotsUsing Ultrasonic Beacons and Dead-reckoning".











num = [30.3215 39.41795 12.81083]; den = [0 1 0]; s1 = tf(den, num) bode(s1)






from sys import argv
from PIL import Image
def openFile(fileName):
f = open(fileName, 'r')
mensaje = list()
for line in f:
mensaje.append(line)
f.close()
return "".join(mensaje)
def setMsn(mensaje):
m2 = list()
mensaje = list(mensaje)
for i in mensaje:
u = bin(ord(i))[2:].zfill(8)
for j in u:
m2.append(j)
return m2
def getMsn(mensaje):
m2 = list()
a = 1
b = ''
for i in mensaje:
b = b+i
if(a%8 == 0):
m2.append(chr(int(b,2)))
b = ''
a = a + 1
return "".join(m2)
def pixelF(m2, v, count):
if(v[7:8] != m2[count]):
v = v[:7]+m2[count]
else:
v = v
return int(v, 2)
def openImage(fileName, m2):
im = Image.open(fileName)
rgb = im.convert('RGB')
c = 0
while c != len(m2)-1:
for i in range(0, im.size[0], 3):
for j in range(im.size[1]):
b = rgb.getpixel((i, j))[2]
v = bin(b)[2:].zfill(8)
w = pixelF(m2, v, c)
r = rgb.getpixel((i, j))[0]
g = rgb.getpixel((i, j))[1]
d = tuple([r,g,w])
im.putpixel((i,j),d)
if(c == len(m2)-1): break
c = c+1
im.save(str(2)+fileName, "PNG")
def decodeM(fileName):
im = Image.open(fileName)
rgb = im.convert('RGB')
arrayRGB = list()
for i in range(0, im.size[0], 3):
for j in range(im.size[1]):
b = rgb.getpixel((i, j))[2]
v = bin(b)[2:].zfill(8)
arrayRGB.append(v[7:8])
return arrayRGB
def main():
mensaje = openFile(argv[1])
mensaje = setMsn(mensaje)
imagen = argv[2]
print imagen
w = openImage(imagen, mensaje)
m2 = decodeM(str(2)+imagen)
print getMsn(m2)
main()
from sys import argv
from PIL import Image
def getMsn(mensaje):
m2 = list()
a = 1
b = ''
for i in mensaje:
b = b+i
if(a%8 == 0):
m2.append(chr(int(b,2)))
b = ''
a = a + 1
return "".join(m2)
def decodeM(fileName):
im = Image.open(fileName)
rgb = im.convert('RGB')
arrayRGB = list()
for i in range(0, im.size[0], 3):
for j in range(im.size[1]):
b = rgb.getpixel((i, j))[2]
v = bin(b)[2:].zfill(8)
arrayRGB.append(v[7:8])
return arrayRGB
def main():
m2 = decodeM(str(1)+imagen)
print getMsn(m2)
main()
function estabilidad%(num, den)
k = 1;
v = 2.5;
num = [k v];
den = [3 4 1 434]; #Este ultimo es la constante de distancia del sensor determ.objeto
sys = tf(num, den)
figure (1)
nyquist (sys)
figure (2)
rlocus (sys)
figure (3)
impulse (sys)
raices = roots (den)
contador = 0
for i = 1:length(raices)
if real(raices(i)) > 0
contador + 1;
endif
endfor
if contador > 0
printf("Sistema Inestable")
else printf("Sistema Estable \n")
endif
endfunction






"SOBER-128 is based on simple 32 bit operations*. Keys and optional nonces of arbitrary length are supported. Enumeration of keys is thought to be the most efficient attack for key lengths of 128 bits or less. SOBER-128 may be configured to calculate an arbitrary length Message AuthenticationCode (MAC) as part of the encryption or decryption process."
Step(R):
x = R[15] ^ R[4] ^ (R[0] << 8)
^ Multab[(R[0] >> 24) & 0xff];
for (i = 0 to 15):
R[i] = R[i + 1];
R[16] = x;
pseudocode:
NLF(R, Konst) = f((((f(R[0] + R[16]) >>> 8) + R[1]) ^ Konst)
+ R[6]) + R[13];

f(x) = SBox[x >> 24] ^ x;

PFF(R, Konst, x) = f((f(R[4] + x) >>> 8) + Konst);

Step(R);
x = NLF(R, Konst);
for (i = 0 to 3):
v[i] = x & 0xff;
x = x >> 8;
for (i = 0 to p.length - 1):
c[i] = p[i] ^ v[i];
for (i = 0 to p.length - 1):
p[i] = c[i] ^ v[i];
"The base attack on SOBER-128 is an exhaustive key search, (complexity of 2^128).In all attacks, it is assumed that the attacker observes a certain amount of keystream produced by one or more secret keys, and the attacker knows the corresponding plaintext and nonces. This is considered to resist an attack if either the attack requires the owner of the secret key(s) to generate more than 2^80 key stream words, or the computational complexity of the attack is equivalent to the attacker rekeying the cipher 2^128 times and generating at least 5 words of output each time."














{kind=link}