"Control de velocidad de un motor de corriente directa"
Introducción:
Existen diversas situaciones donde el control de la velocidad de un motor es crítica,
por ejemplo, cuando un robot es movido por 2 motores y se quiere avanzar en cierta
dirección, controlar la velocidad de ambos es importante. La velocidad de rotación de un disco duro o un lector de CD/DVD es otro caso. Para ello es necesario adaptar el motor a diversas situaciones de funcionamiento que puedan suceder, por ejemplo, si un móvil va cuesta arriba o cuesta abajo, o cuando existe fricción entre las partes.
Principalmente el proyecto esta constituido por 3 partes:
- Sensor: Que consta de un optointerruptor ITR8102 y un disco horadado como encoder.
- Microcontrolador: El cual es un Arduino UNO que procesa la salida del sensor para adaptar la velocidad.
- Planta: Será el motor eléctrico el cual será controlado.
Motivación y Aplicaciones:
El motivo por el cual nos motivó a realizar este proyecto fue el interés en la cuál poder controlar las revoluciones causadas en un motor y éste poderlo aplicar más adelante para su mejor evaluación o ciclo de vida.
Las aplicaciones más comunes que vemos al emplear este tipo de control, es visto en diferentes ramas de la ingeniería , desde lo muy básico hasta en componentes más robustos, algunos ejemplos a mencionar son:
- Control de revoluciones de un motor:
- Carritos de radio control (carritos seguidores de líneas)
- Automóviles
- Desplazamiento de un neumático de un sistema ferroviario
- Sistema de control de estabilidad de los neumáticos.
Video aplicación:
Función de Transferencia:
La función de transferencia de nuestro proyecto es la siguiente:

Donde los valores que se emplean al evaluar la función de transferencia son los siguientes:
- J = 0.01 # Momento de inercia del motor 0.01 Kg m^2
- b = 0.1 # Constante de fricción viscosa 0.1 Nms
- K = 0.01 # Constante de fuerza electromotriz 0.1 V/rad/s y Constante de torque del motor 0.1 Nm/A
- R = 1 # Resistencia eléctrica 1 Ohm
- L = 0.5 # Inductancia eléctrica 0.5 H
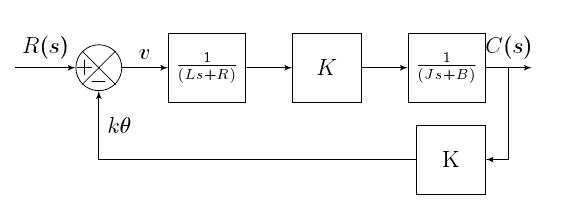
Diagrama de Bloques:
El diagrama de bloques esta representado de la siguiente forma:
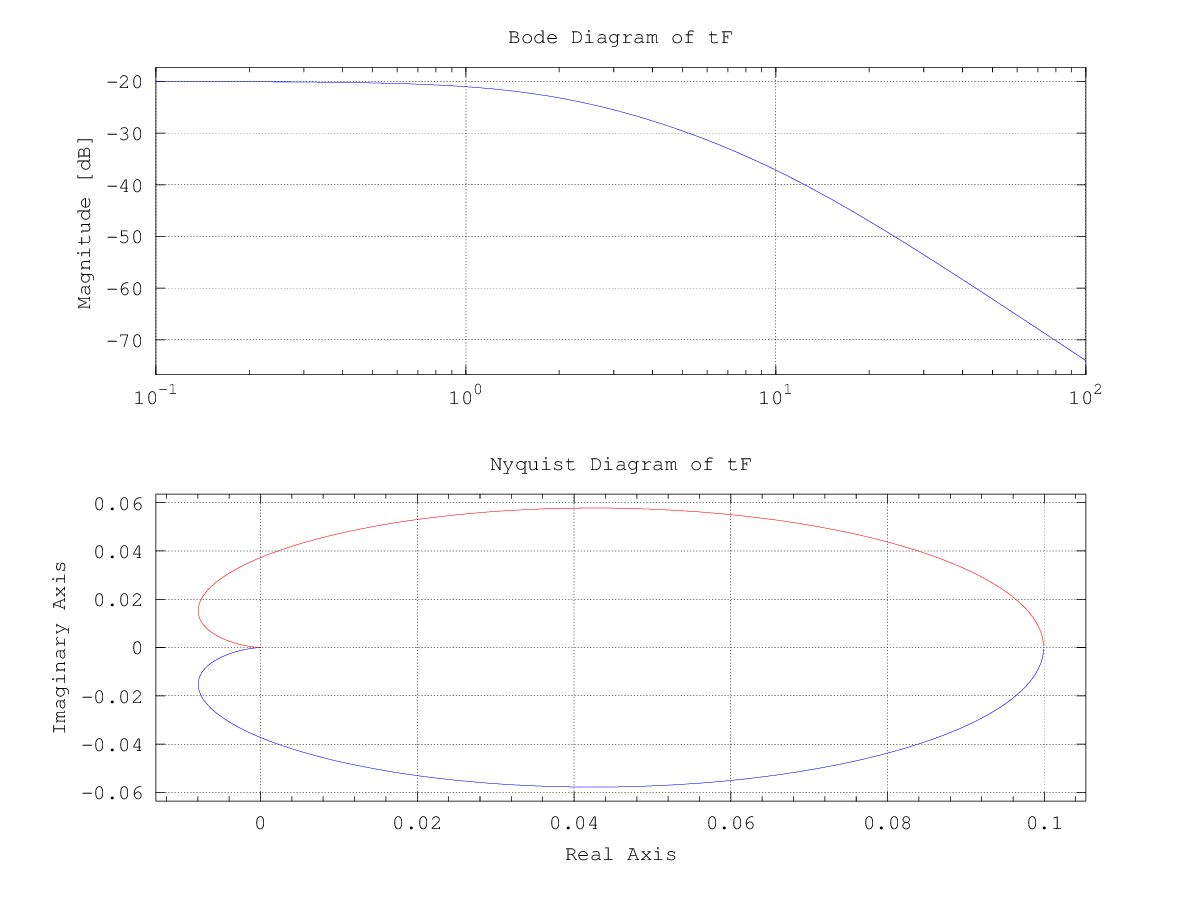
Estabilidad:
Dando una breve argumentación de nuestro sistema que tan estable es, podemos concluir con la ayuda del diagrama de bode y nysquit que nuestro sistema es muy estable, ya que podemos observar que los polos están recargados a la izquierda.
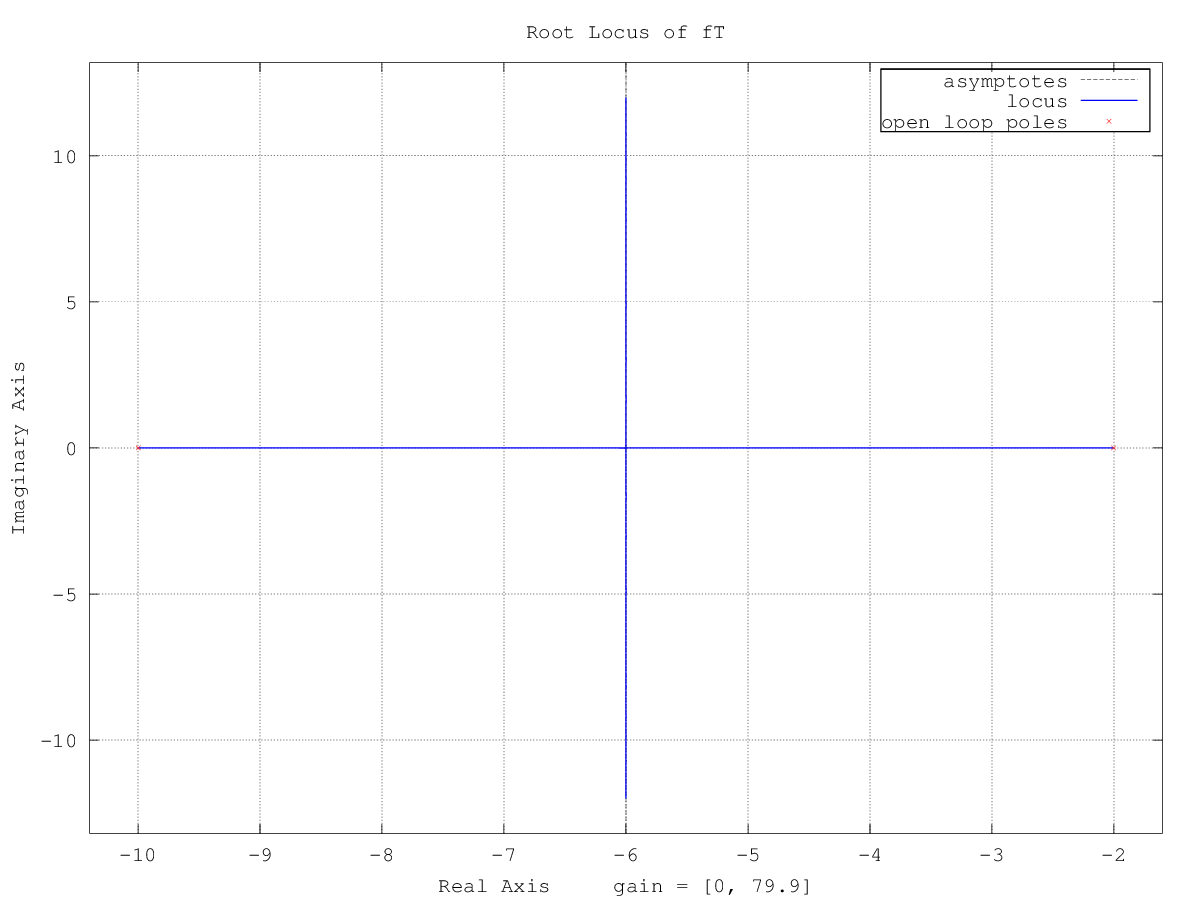
Raíces:
Obteniendo las raíces con ayuda de RLOCUS podemos argumentar que nuestro sistema se encuentra estable, ya que todas las raíces se encuentran en el semi-plano izquierdo.
Componentes:
Para el desarrollo del proyecto se emplearon los siguientes componentes:
- Motor DC
- Puente H L239D
- Optointerruptor ITR 810
- 1 Encoder
- 2 Resistencias 10k y 330k
- Arduino UNO R3
- Fuente o Batería Externa max 12 volt 0.6 mA
- Protoboard
- Jumpers
- 1 Led
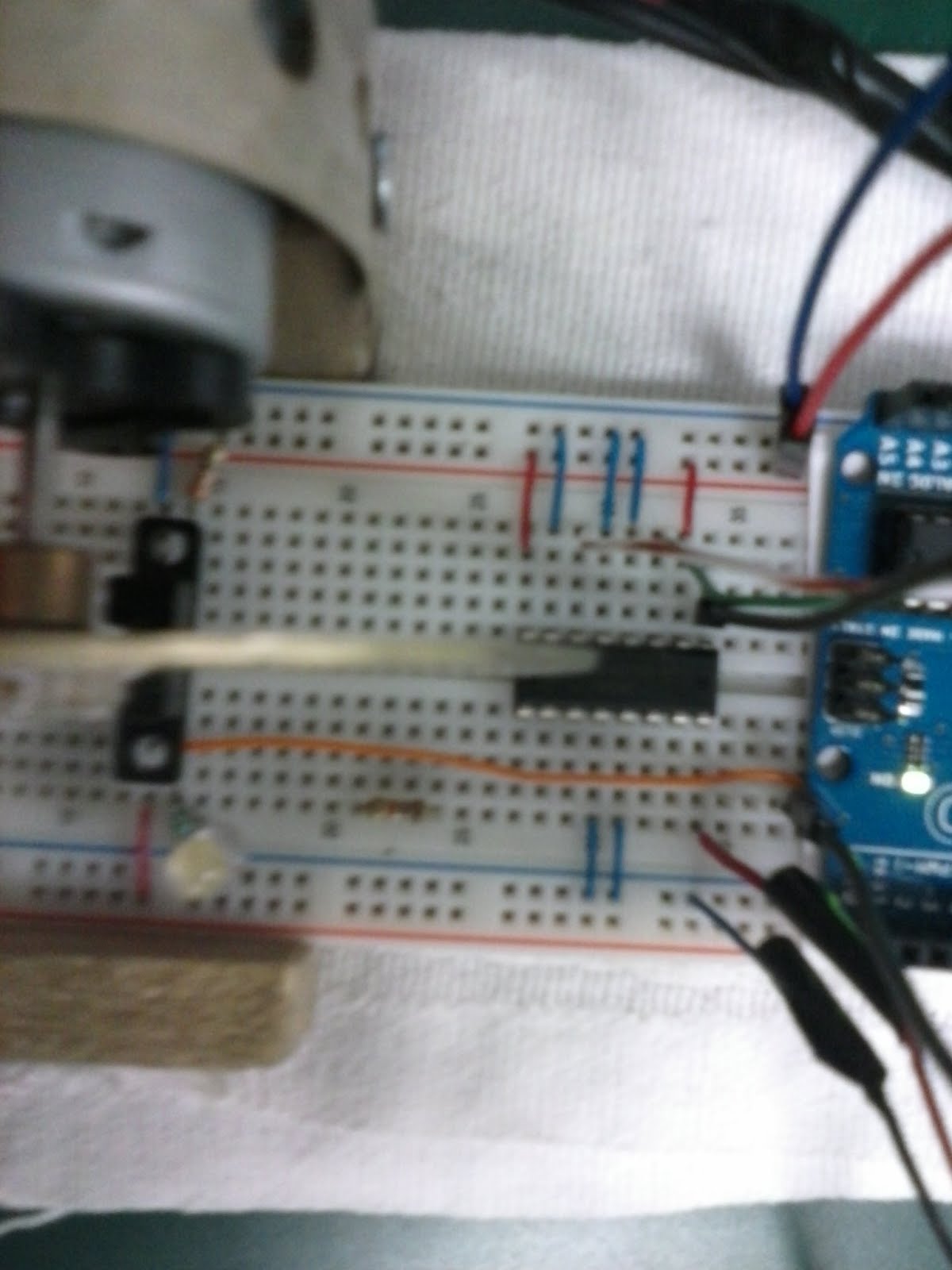
Diagrama de conexión

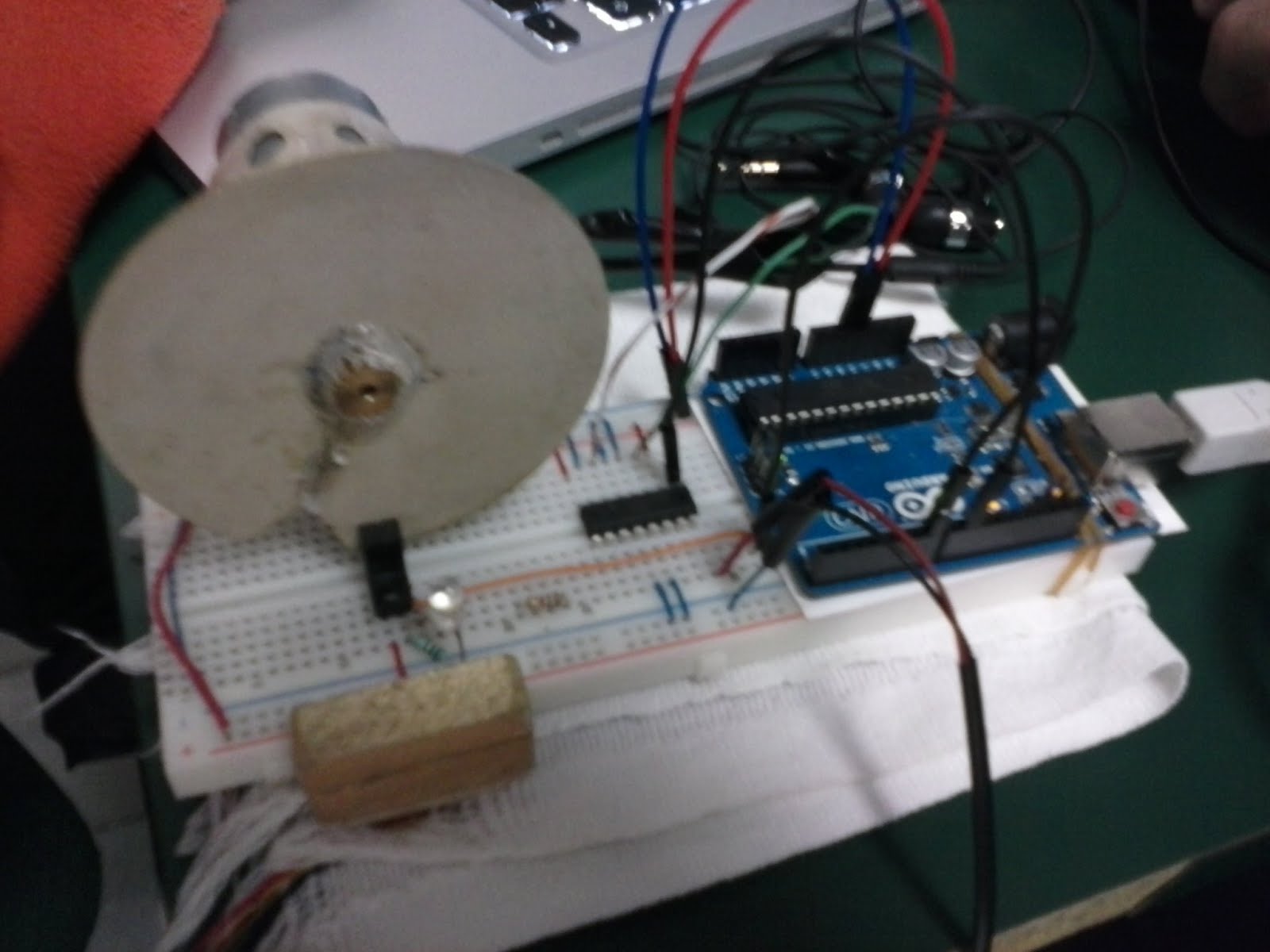
Prototipo:
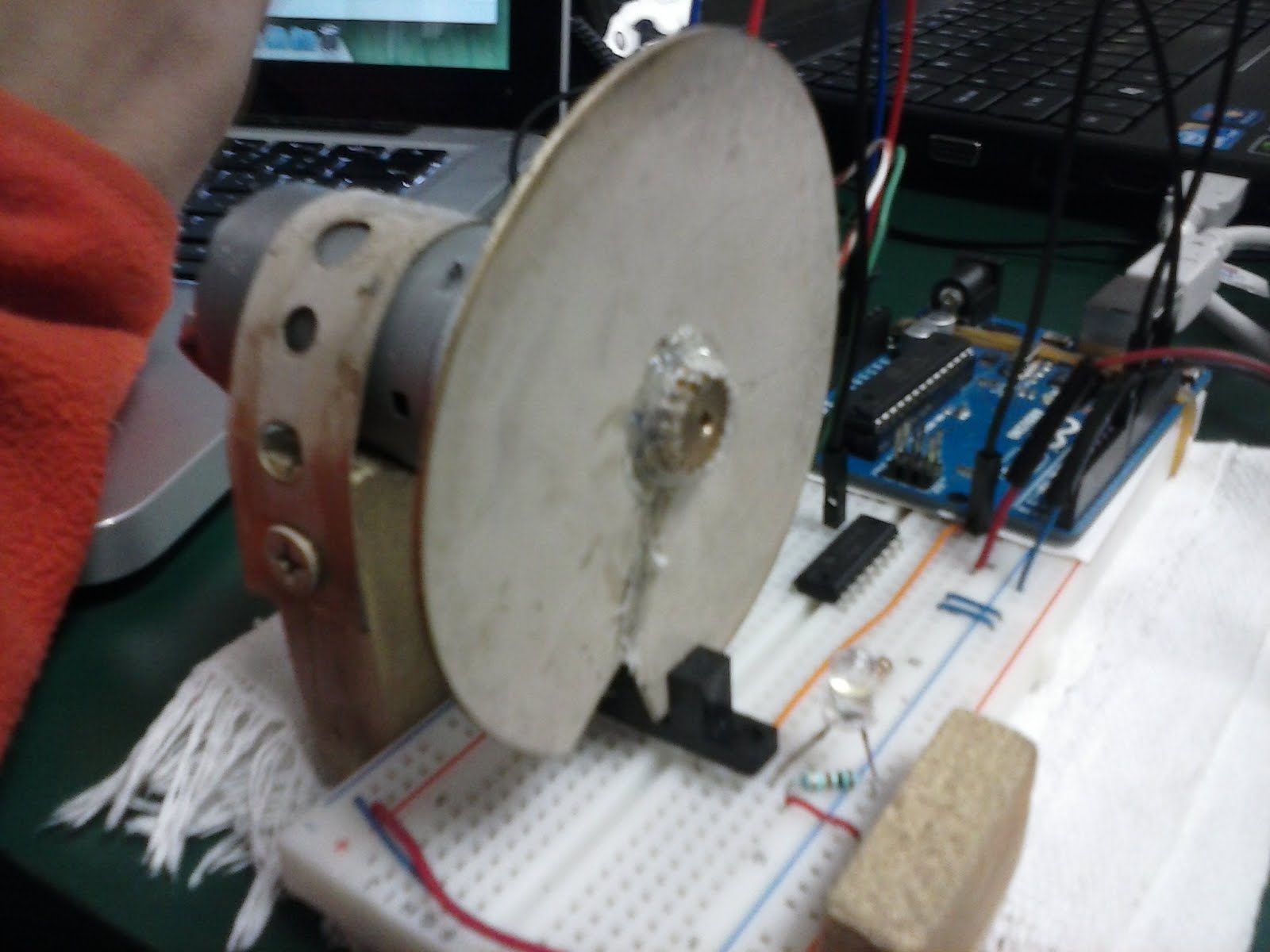
Código:
Video Proyecto:
Presentación Proyecto Final:
enlace presentación pdf
Integrantes del equipo:
Juan Carlos Espinosa Ceniceros
Rafael Lopez Gutierrez
Abraham José Silva Orozco
Otras entradas:
Reporte propiedades estructurales del proyecto
La ortografía se pone de repente lamentable. Me hubiera gustado alguna validación experimental de que la función de transferencia en realidad coincide con el comportamiento del sistema físico. Van 13 pts por el reporte.
ResponderEliminar